具身灵巧手
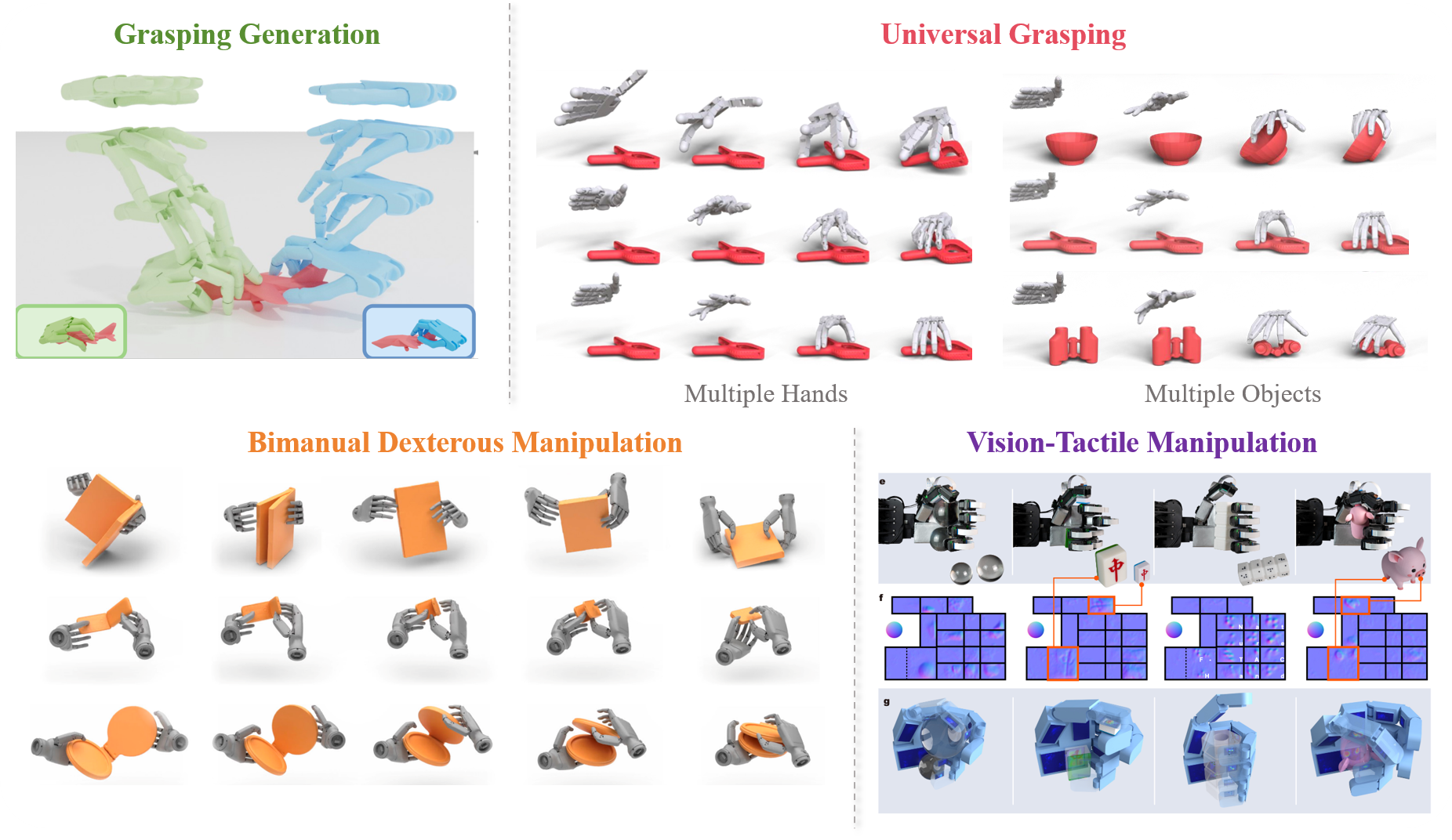
具身智能通过将抽象的认知转化为具体的物理行动,赋予人工智能感知、适应并主动操控真实世界的能力。这一特性使其在服务机器人、康复辅助、工业自动化等领域具备实现高效、安全自主决策的潜力。作为具身智能在物理交互层面的关键执行器,具身灵巧手凭借其接近人类的精细操控能力,显著提升了人机交互的自然度与情境适应性:例如,辅助生活机器人能够以类人方式轻柔地端起水杯、为病患喂食;在生产线上完成精密电子元件的组装与插拔;在危险品处理任务中稳定操作多种工具,实现安全的远程隔离操作。我们的研究聚焦于以下几个核心方向:抓握策略生成旨在优化动态操控行为并减少执行失误;通用化抓握技术致力于增强对多样化物体的抓取鲁棒性及对不同结构灵巧手的兼容性;双手协同灵巧操控通过提升协同任务的效率与精准度,拓展操作能力边界;视触融合操控则整合视觉与触觉多模态感知,构建更为直觉且安全的交互闭环。这些核心技术的研究将推动具身灵巧手在医疗机器人、家庭/公共服务机器人等复杂场景中的应用落地,有效降低人力负担并提升任务执行的精度与安全性。